RBD Example 2
Complex RBD interaction setup with multiple object types and behaviors
Overview
This example demonstrates a more complex RBD setup in Houdini, featuring multiple interacting objects with different RBD behaviors. The simulation includes dynamic, static, and animated objects, showing how different RBD types can work together in a single setup.
Preview
Full resolution preview of the RBD interaction simulation
Node Network Structure
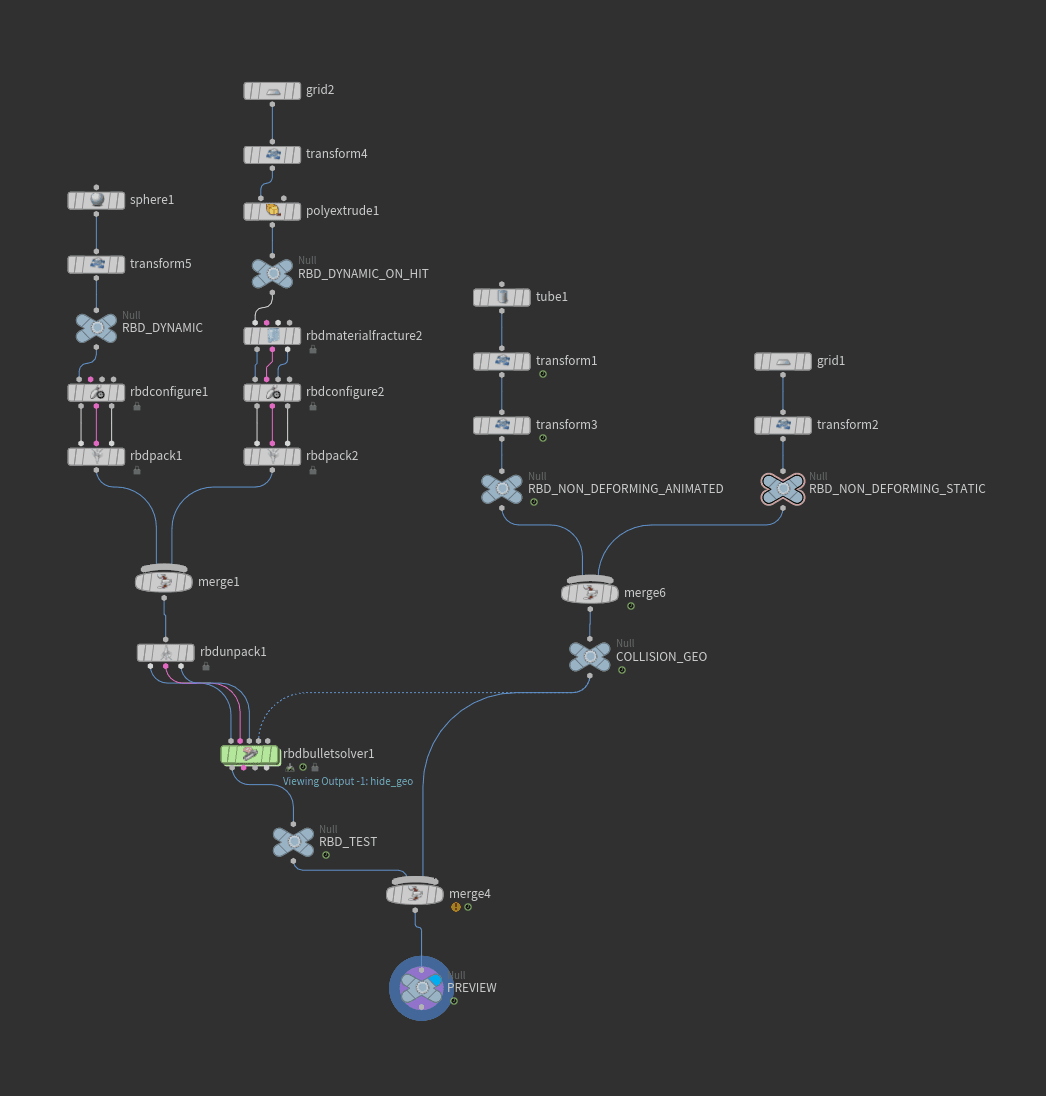
RBD node network setup showing key components
Object Setup
Scene Components (Top to Bottom):
Ball (RBD Dynamic)
active = 1
animated = 0
deforming = 1
sleeping = 0
enable_sleeping = 0Block Piece (RBD Dynamic on Hit)
active = 1
animated = 0
deforming = 0
sleeping = 1
enable_sleeping = 1Spinning Tube
RBD Non-deforming Animated
Slanted Plane
RBD Non-deforming Static
Solver Configuration
RBD Bullet Solver Settings:
# Collision Geometry Settings
collision_geometry = "deforming/convex hull"
substeps = 2
friction = 0.3
bounce = 0.4
# Performance Settings
ground_plane = 1
update_frequency = 1
shape_matching = 1Key Considerations:
- Use deforming collision geometry for the dynamic ball
- Enable sleeping for static objects to improve performance
- Properly configure animated objects to affect dynamics
- Adjust friction and bounce for realistic interactions
Best Practices
- Use appropriate RBD types for each object based on its role
- Configure sleeping parameters to optimize performance
- Consider collision geometry type based on object complexity
- Test interactions with simplified geometry first
- Cache results for complex multi-object interactions